株式会社 中之島設計
【プロへの集中を支える「支援」手当有/年休125日/土日祝休】 未経験から「自律したプロ」へ。自律と成果を正当に還元!
フリーワード
PR
株式会社 中之島設計
【プロへの集中を支える「支援」手当有/年休125日/土日祝休】 未経験から「自律したプロ」へ。自律と成果を正当に還元!

株式会社 美都住販
高性能住宅と特建で街を支える総合建築会社。暮らしを支え、地域の未来を創り続けます。

一宇工業 株式会社
【奨学金代理返還・学資資金貸付制度あり】地元関西で地図に残る仕事をしませんか?

ロイヤルウッド株式会社
お客様の想いを一つひとつ形にしていく完全オーダーメイドです。自分たちが心から誇れる家づくりに情熱を注ぎ大切にしています。
株式会社オープンハウス・ディベロップメント
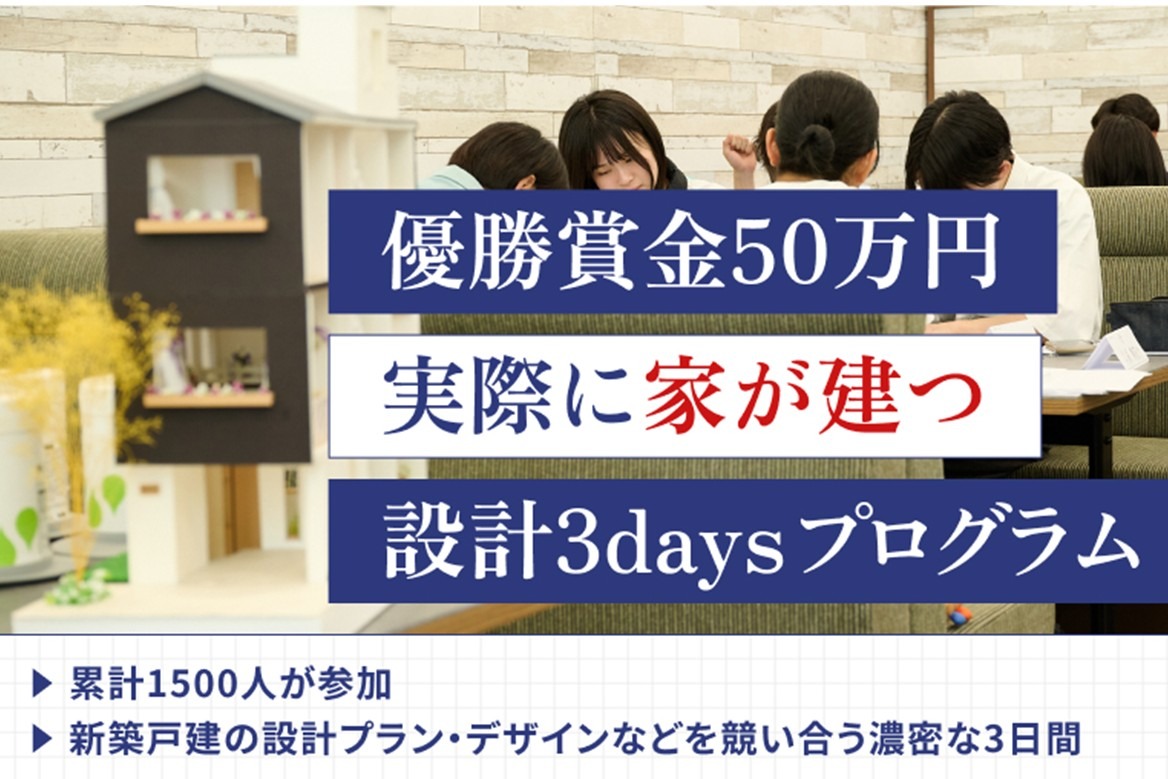
【優勝50万円】教科書を超えた実戦へ。実際に家が建つ感動と圧倒的スキル。就活を有利に進める、建築学生必見の3日間。
株式会社サーフ
日本ハウズインググループ企業✨完全週休2日制・初任給27万円~
PR
ロイヤルウッド株式会社
お客様の想いを一つひとつ形にしていく完全オーダーメイドです。自分たちが心から誇れる家づくりに情熱を注ぎ大切にしています。
株式会社オープンハウス・ディベロップメント
【優勝50万円】教科書を超えた実戦へ。実際に家が建つ感動と圧倒的スキル。就活を有利に進める、建築学生必見の3日間。
株式会社 中之島設計
【プロへの集中を支える「支援」手当有/年休125日/土日祝休】 未経験から「自律したプロ」へ。自律と成果を正当に還元!
株式会社 美都住販
高性能住宅と特建で街を支える総合建築会社。暮らしを支え、地域の未来を創り続けます。
一宇工業 株式会社
【奨学金代理返還・学資資金貸付制度あり】地元関西で地図に残る仕事をしませんか?
株式会社サーフ
日本ハウズインググループ企業✨完全週休2日制・初任給27万円~
株式会社鴻池組は、トンネル工事の危険個所において、株式会社ポケット・クエリーズと共同で、四足歩行ロボットの遠隔観察システムの実証実験を行ったことを発表しました。本記事は2025年7月7日付、同社のプレスリリースから、情報を紹介します。
トンネル工事では、切羽(きりは)と呼ばれる掘削面の状況確認が工事進捗には不可欠ですが、この観察作業は落石や崩落の危険を伴う場所で行う必要があり、作業員の安全確保が大きな課題でした。
鴻池組では、以前よりポケット・クエリーズ社と共同でロボット技術開発に取り組んでおり、今回、危険個所に人が立ち入ることなく、遠隔で観察できるシステムの開発に着手しました。
開発で目指したシステムは、四足歩行ロボットに高性能カメラを搭載し、ライントレース機能により自律走行する技術です。このシステムは危険箇所でも安定した歩行が可能で、鮮明な画像データを取得できるものです。
実証試験では、従来の人による観察と同等の精度で切羽状況を把握することに成功し、その結果、作業員の安全リスクを大幅に軽減しながら、効率的な観察作業を実現することができました。

このシステムにより、これまで作業員が直接立ち入っていた危険な場所での観察作業を遠隔で行うことが可能になり、建設現場の労働安全向上に大きく貢献することが期待できます。
鴻池組は、今後もポケット・クエリーズ社と共同で、AIによる切羽評価システムを導入し、取得した切羽画像から切羽状況を自動で評価する機能や、今回のライントレース機能に加えて3D-LiDARによる自己位置推定機能を開発することで、より高度な切羽評価と自律走行技術の確立を目指していくとのことです。
これらの実用化が進めば、トンネル工事の安全性向上と作業効率化を両立することができ、建設業界のDX推進にますます貢献していくことでしょう。
(本記事は、総合資格naviライター kouju64が構成しました。)